作者zxcvxx (zxcvxx)
看板car
標題[新聞] 類人性化推理的自駕車導航
時間Fri Jul 5 11:12:35 2019
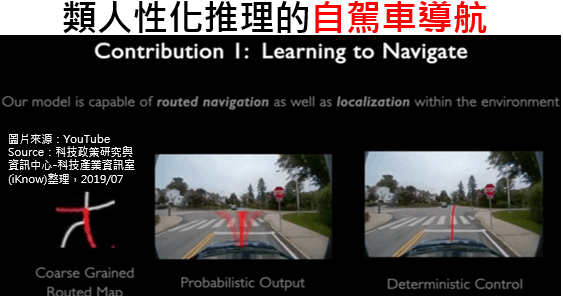
類人性化推理的自駕車導航
原文連結:
https://bit.ly/2NA1jb7
原文內容:
http://iknow.stpi.narl.org.tw/Post/Figures/2019/market/mech_15766_20190705.png
透過觀察和簡單的工具,人類駕駛者可以駕駛以前沒有行駛過的道路。我們只是將我們周
遭看到的內容與GPS設備上看到的內容進行比對,來確定我們的位置以及我們想要去的地
方。然而,無人駕駛汽車卻會在這種基本推理中掙扎,因為在每個新的區域,汽車必須先
測繪和分析所有新道路,且系統也依賴於復雜的地圖與動態處理與生成,這非常耗時。
麻省理工學院的研究人員在機器人與自動化國際會議上發表研究成果,他們創建了卷積神
經網絡(CNN)的機器學習系統,該系統僅使用簡單的地圖和攝影機的影像數據,使無人駕
駛汽車能夠在新的複雜環境中導航,類似人類駕駛推理模式,可以駕駛以前沒有駕駛過的
道路。
與人類駕駛員類似,系統還可以檢測其地圖與道路特徵之間的任何不匹配。這有助於系統
確定其位置,傳感器或映射是否不正確,以便糾正汽車的航向。在自動駕駛期間,系統連
續地將影像數據與地圖數據比對,並記錄任何不匹配,協助自動駕駛汽車確定道路上的位
置,也確保汽車保持在最安全的路徑上,如果行駛過程中與輸入資訊矛盾時:如汽車在沒
有轉彎的直道上行駛,並且GPS指示汽車必須向右轉,汽車將知道要保持直行或停車。
在現實世界中,感測器會失效的時候,研究人員希望透過建構一個能夠接受這些雜訊輸入
的系統,來確保系統對不同感測器的故障問題仍具有健全性,並且仍能在路上正確導航和
定位。
心得/說明:(30字以上)
麻省理工學院的研究團隊利用卷積神經網路的機器學習系統,讓自動駕駛汽車能夠在導航
系統中,以類似人類的推理模式行駛在過去未駕駛過的道路。這個推理的過程高度依賴演
算法,研究人員希望透過開發這樣的系統,能替自動駕駛的改良有所助益。
--
※ 發信站: 批踢踢實業坊(ptt.cc), 來自: 203.145.192.245 (臺灣)
※ 文章網址: https://www.ptt.cc/bbs/car/M.1562296359.A.0E4.html
推 bcs: CNN當紅,沒用就不夠AI 07/05 11:52
推 e04bank: NCC表示 07/05 14:53
推 mmppeegg: 以後還會做出逼車動作 07/05 15:26
推 NoManInCar: 類人性化的駕駛 會不會有類人性化的肇事率? 07/05 15:27